其实就是用
numpy.linalg.solve解方程啦
透视变换就是三维空间上的一个点乘上变换矩阵转移到别的坐标(因为图片本身是二维的,所以新旧坐标的z值都为1),即:
\begin{bmatrix} XW \\ YW \\ W \end{bmatrix} = \begin{bmatrix} a & b & c \\ d & e & f \\ g & h & 1 \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \end{bmatrix}
解得新坐标:
X = \frac {ax+by+c} W = \frac {ax+by+c} {gx+hy+1}
Y = \frac {dx+ey+f} W = \frac {dx+ey+f} {gx+hy+1}
但其实a-h是未知的,所以得先通过几对给定的新旧点来解出它们,才能得到新旧图片上所有点的映射。
解a-h的步骤如下:首先把分母与左边的X/Y相乘,再整理等式把单独的X/Y拿到等号右边可以得到两个方程:
ax+by+\phantom 1 c-0d+0e+0f-Xxg-Xyh=X
0a+0b+0c+xd+ye+\phantom 1 f-Yxg-Yyh=Y
转换成矩阵形式:
\begin{bmatrix} x & y & 1 & 0 & 0 & -1 & -Xx & -Xy \\ 0 & 0 & 0 & x & y & 1 & -Yx & -Yy \\ & & & & & \vdots \end{bmatrix} \begin{bmatrix} a \\ b \\ c \\ d \\ e \\ f \\ g \\ h \end{bmatrix} = \begin{bmatrix} X \\ Y \\ \vdots \end{bmatrix}
8个未知数需要8个方程来解,每对新旧点提供两个方程,所以需要4对点来填满矩阵,求解a-h相当于解形如Ax=b的方程。numpy.linalg.solve就是用来解Ax=b的函数,用A与b当参数调用就可以得到x(a-h),这样我们就得到了变换矩阵。
构造A、b与解变换矩阵的代码如下:
A_list = []
b_list = []
for xy, XY in zip(old_points, new_points):
A_list.append([xy[0], xy[1], 1, 0, 0, 0, -XY[0] * xy[0], -XY[0] * xy[1]])
A_list.append([0, 0, 0, xy[0], xy[1], 1, -XY[1] * xy[0], -XY[1] * xy[1]])
b_list.extend(XY)
a, b, c, d, e, f, g, h = np.linalg.solve(A_list, b_list)
H = np.array([[a, b, c], [d, e, f], [g, h, 1]])拿到变换矩阵遍历新图的每一处(X, Y)坐标,再通过numpy.linalg.solve就可以算出变换前的(x, y)坐标:
\begin{bmatrix} a & b & c \\ d & e & f \\ g & h & 1 \end{bmatrix} \begin{bmatrix} x/W \\ y/W \\ 1/W \end{bmatrix} = \begin{bmatrix} X \\ Y \\ 1 \end{bmatrix}
xy1 = np.linalg.solve(H, [X, Y, 1])
x, y, _ = (1 / xy1[2] * xy1).astype(int)然后把原图(x, y)处的灰度值拿来放到新图的(X, Y)处即可(是的,这里没考虑插值啥的):
if 0 <= x < im.shape[0] and 0 <= y < im.shape[1]:
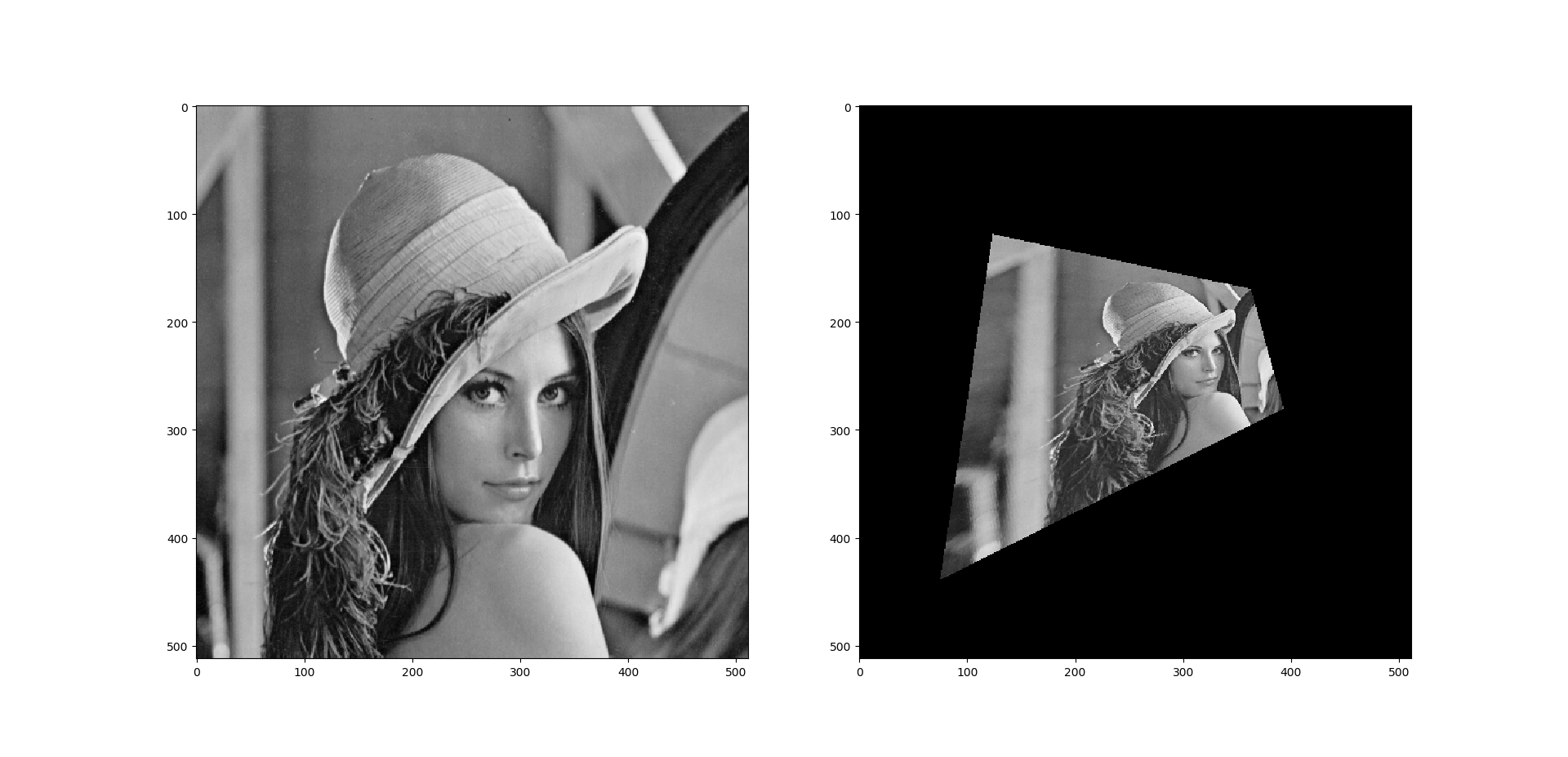
newim[X, Y] = im[x, y]效果图: